信息中心


开发新型智能中空纳米机器人是当前最前沿的研究领域之一,对精准医疗、传感检测等领域的发展至关重要。目前大多数中空纳米机器人为不对称开口结构,然而单一的开口会限制物质和能量的传输效率。因此,用多孔壳层替代单一开口是提高中空纳米机器人性能的潜在途径之一。
针对以上问题,复旦大学孔彪课题组开发动力学调控界面选择性超组装策略,成功构筑具有选择性中空结构的纳米机器人,且其拓扑结构可以精准调控。此外,该新型中空纳米机器人可以实现货物分子的可控装载及卸载,在生物医疗等领域具有潜在应用。
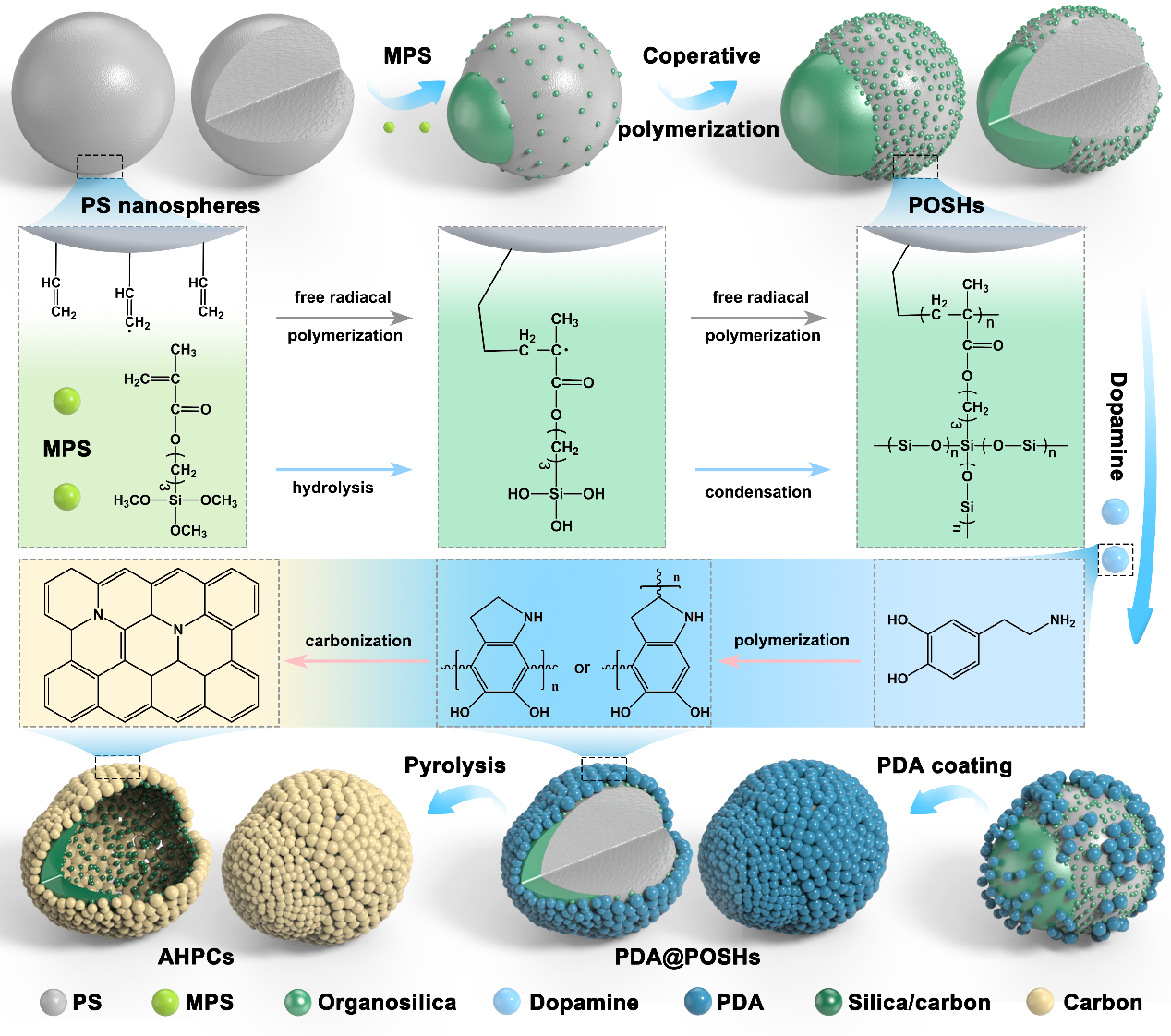
作者巧妙利用前驱体中同时发生的(烯基)自由基聚合反应和(三甲氧基硅烷)水解聚合反应,实现了有机硅在聚苯乙烯纳米颗粒表面的选择性岛状生长,随后经过包裹聚多巴胺及高温煅烧得到具有选择性中空结构的纳米机器人。此外,通过精确调控两种聚合反应的动力学,可以实现对岛状有机硅尺寸和数量等参数的精准调节,进而可以根据不同需求合成具有可调拓扑结构的多功能纳米机器人。
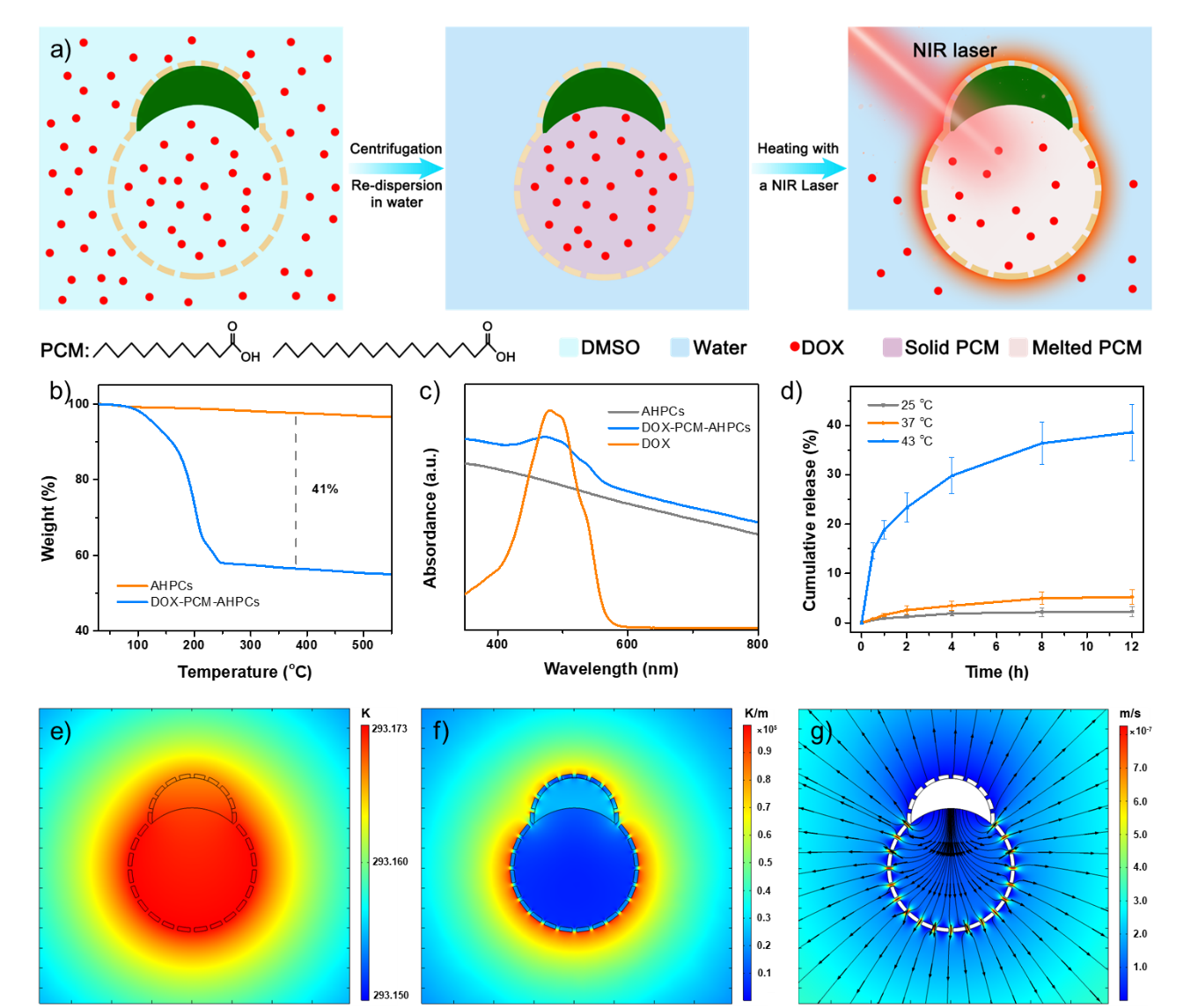
作者进一步充分利用其特殊中空结构及光热性能,证明该中空纳米机器人可以实现货物分子的高效装载及在近红外光照射下的可控释放。FEA模拟结果进一步证明了该中空纳米机器人的中空限域装载及卸载能力。在该工作中,孔彪研究员团队开发了动力学调控界面选择性超组装策略,并基于该策略构筑了一系列具有可调拓扑结构的中空纳米机器人。该超组装策略为设计开发新型多功能智能中空纳米材料提供了一种简便的方法。
相关研究工作日前以“Kinetics-Regulated Interfacial Selective Superassembly of Asymmetric Smart Nanovehicles with Tailored Topological Hollow Architectures”为题发表于化学旗舰期刊Angewandte Chemie International Edition上,该研究得到了国家重点研发计划、国家自然科学基金等项目的支持。
全文链接:https://onlinelibrary.wiley.com/doi/10.1002/anie.202200240


